Описание системы привода дроссельной заслонки - LDE
Описание цепи/системы
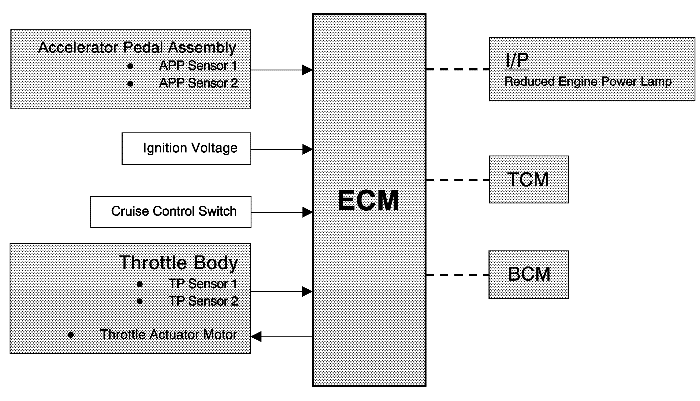
Контроллер ЭСУД (ECM) является управляющим центром системы управления приводом дроссельной заслонки (TAC). Модуль ECM определяет сигналы формирователей на основе входных сигналов от датчиков положения педали акселератора, а затем вычисляет соответствующую ответную реакцию дроссельной заслонки на основе датчиков положения дроссельной заслонки. Управление положением дроссельной заслонки осуществляется контроллером ЭСУД посредством широтно-импульсного модулированного сигнала напряжения на сервомотор привода дроссельной заслонки. Створка дроссельной заслонки подпружинена в обоих направлениях, в исходном положении она слегка приоткрыта.
Режимы работы
Нормальный режим
Система TAC может работать в одном из нескольких режимов (выполнять несколько функций), которые относятся к нормальным. Во время нормальной работы система может переходить в следующие режимы:
| • | Минимальное значение педали - При увеличении значения модуль ECM обновляет минимальное значение педали, полученное в результате обучения системы. |
| • | Минимальные значения положения дроссельной заслонки - При увеличении значения модуль ECM обновляет минимальное значение положения дроссельной заслонки, полученное в результате обучения системы. Для "обучения" минимальному значению положения дроссельной заслонки ее перемещают в закрытое положение. |
| • | Режим антиобледенения - Если дроссельная заслонка не способна достигнуть предварительно установленного положения, включается режим антиобледенения. В режиме взламывания льда контроллер ЭСУД несколько раз выдает сигнал с максимальной шириной импульсов на сервомотор привода дроссельной заслонки в направлении закрывания. |
| • | Режим экономии энергии аккумуляторной батареи - Если после истечения заранее установленного периода времени значение частоты вращения двигателя в об/мин отсутствует, то модуль ECM выдает команду на включение режима экономии энергии аккумуляторной батареи. В режиме экономии энергии аккумуляторной батареи модуль TAC корпуса дроссельной салонки снимает напряжение с цепей управления электродвигателями, что устраняет потребляемый от аккумулятора ток, который используется для сохранения положения холостого хода и позволяет возвратить дросссельную заслонку в исходное положение, когда на заслонку действует сила пружины. |
Режим пониженной мощности двигателя
Когда контроллер ЭСУД обнаруживает соответствующие условия в системе TAC, он может перевести систему в режим пониженной мощности двигателя. Понижение мощности двигателя может быть вызвано одним из следующих условий:
| • | Ограничение разгона - Модуль ECM продолжает использовать педаль акселератора для управления дроссельной заслонкой, однако, разгон автомобиля ограничивается. |
| • | Режим ограничения дроссельной заслонки - Модуль ECM продолжает использовать педаль акселератора для управления дроссельной заслонкой, однако, максимальный угол открывания дроссельной заслонки ограничивается. |
| • | Режим исходного положения дроссельной заслонки - Модуль ECM выключает двигатель привода дроссельной заслонки, и дроссельная заслонка возвращается в подпружиненное исходное положение. |
| • | Принудительный режим холостого хода - Модуль ECM выполняет следующие действия: |
| - | Ограничивает обороты двигателя до уровня холостого хода изменением положения дроссельной заслонки или управляя подачей топлива и зажиганием, если дроссельная заслонка отключена. |
| - | Игнорирует входной сигнал положения педали акселератора. |
| • | Режим глушения двигателя - Модуль ECM перекрывает подачу топлива и отключает электропитание привода дроссельной заслонки. |
| © Все права принадлежат Chevrolet. All rights reserved |



